Robots Confront Challenges Underground

The Defense Advanced Research Projects Agency is experimenting with underground robotic capabilities through its three-year contest—the Subterranean Challenge, also called SubT. This competition aims to spur tactical communications, mapping and search-related robotic technologies for use in subterranean environments.
Successfully operating missions underground, especially for first responders, is difficult, given the conditions. And because the subterranean environment could be the next frontier in multidomain urban warfare, advancements in autonomous systems and communications for below ground applications that help augment human capabilities are crucial for the military as well. So far, teams competing in the agency’s multiphase contest have encountered the most difficulty in employing communications solutions underground.
The agency, known as DARPA, held the tunnel circuit, the first part of the SubT contest, in August at a former coal mine in Pittsburgh that is now a research facility owned by the National Institute for Occupational Safety and Health (NIOSH). The agency is gearing up for the second phase of SubT, the urban circuit, in February at the Satsop Business Park, a common underground first responder and military training facility west of Olympia, Washington. In August of 2020, DARPA will host the cave circuit, followed by the grand finale in August of 2021.
At the NIOSH facility, the agency ran the tunnel circuit in the Safety Research Coal Mine and Experimental Mine tunnels—which extend between 4 kilometers and 8 kilometers in length. Eleven teams from around the world raced to score points based on their robots’ abilities to provide a 3D map of the tunnels and find artifacts positioned by DARPA, which included a backpack, fire extinguisher, electric pumps, valves, survivor dummy, radio/cell phones and electrical boxes. Each team had four 60-minute runs, two in each tunnel. The teams had to report to DARPA as fast as possible through a single operator the location of the artifacts in the tunnels within a 5-meter range.
Besides the customary, complex mine atmosphere with coal and silica dust, varying degrees of light and darkness, water, mud, particulates, rocky terrain, inclines, stairs and vertical shafts, DARPA augmented the two tunnels for the competition, adding hazards such as smoke and rubble.
Most teams had a sophisticated level of fully autonomous ground vehicles that could run for the full 60 minutes by themselves with only short periods needed for teleoperation by a human, such as for initial synchronization at the start of the tunnel or when a robot got stuck. “Looking at the status and health of five robots at a time already goes beyond the cognitive load of a human supervisor, so you really need full autonomy,” suggests Luca Carlone, assistant professor, Department of Aeronautics and Astronautics, Massachusetts Institute of Technology (MIT), of Team Co-STAR.
More complicated, however, were the necessary network tools that functioned well in a subterranean environment. The coalificated rocky walls of the mine tended to block radio frequency signals, the moisture and water affected equipment, and the requirements to quickly communicate specific information to DARPA officials at a command post at the mouth of the mine made it difficult. DARPA referred to the communications environment as severe.
“In these tunnels, you basically get line of sight down the first tunnel,” says Sean Humbert, professor, Mechanical Engineering, University of Colorado at Boulder, and principle investigator for Team MARBLE. “Then, once you make the first turn, the robots are basically disconnected from the network, and you lose all information on their localization, their position and what artifacts they found.”
Using combinations of robotic systems and other hardware, the teams created various forms of mobile ad hoc networks, or MANETs, either through wireless stationary routers, robots serving as antennas or tethered connections. Some teams used the so-called daisy chain method—in which robots or drones stay close together to create a communications network—or the so-called breadcrumb method of dropping stationary network nodes or routers to form a network throughout the tunnel.
“Radio doesn’t go through rock, so immediately you’re restricted in terms of what you can do,” says Matt Travers, systems scientist, Carnegie Mellon University’s Biorobotics Laboratory, and one of the Explorer team leads.
Team Explorer, the first place winner of the SubT tunnel track by a large margin, operated with several large four-wheeled robots that had wide, ruggedized tires, about 20-inches in diameter, and aerial systems that could be deployed off the back of the robots. The team embraced a “redundant and reconfigurable” approach, Travers says, relying on multiple algorithms and communication solutions, simultaneous localization and mapping, and multi-model sensing enabled by imaging, 3D cameras and LIDAR. When prompted by a human operator, the robots dropped ranging-radio anchors to form a mesh network; each robot could carry up to 10 network nodes.
“We have a hybrid approach where we allow the vehicles to move out of communication with the operator and come back in,” Travers explains. “That is where the autonomy kicks in. The operator also has the capability to control and guide the vehicles if they are within comms range. And we do drop communication nodes to develop an ad hoc network. We will continue to be refining that for the future competitions because I do think that is a significant challenge.”
Although DARPA had specific rules requiring only one base station operator just outside the mouth of the mine to report the data on the artifacts to the agency, Carnegie Mellon University considered how to have the robots directly coordinate autonomously with each other.
“We have a lot of prior work in that area,” he says. “We use sophisticated multi-robot coordination algorithms to determine those kinds of factors. And as we scale up for the future competitions, it is going to get even more difficult because we’ll be thinking about larger environments, more 3D structures and potentially more robots. So in terms of multi-robot coordination, I’d say that we are exploring possibilities of distributed approaches that do not go back to the base station.”
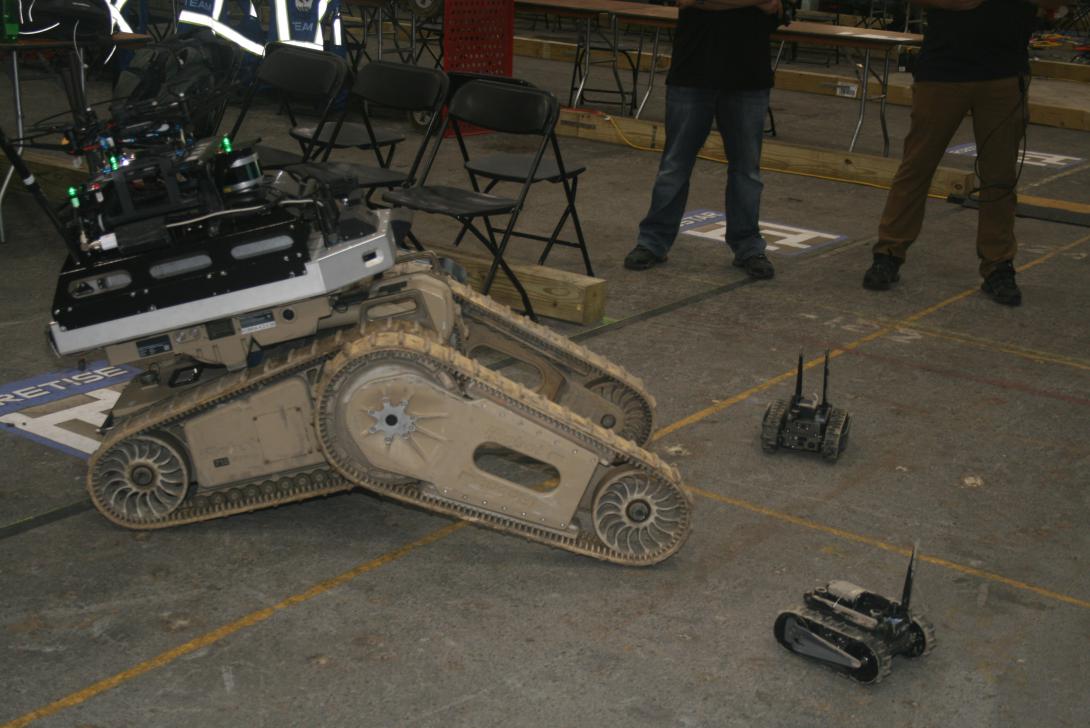
Meanwhile, Team Crestise relied on a combination of large tracked robots with ruggedized, flipper-like legs, called the FLIR Kobra; aerial drones; and several FLIR FirstLook mini robots, which served as network nodes. The team’s strategy was to place the smaller platforms aboard the Kobra, which was equipped with a series of network Persistent Systems MPU radios. Then they drove into the tunnel and deployed from there.
“What we are seeing in the tunnel is that the comms [communications] environment is extremely challenging, and given the time-based component to the scoring, we didn’t want to go out, lose comms and have to come back,” shares FLIR System’s David Weatherwax. “The Kobra can run for 12 hours, and because the tunnel complex is so large, we had it go in as far as it could, then we used the aerial vehicle as a virtual periscope.”
As communications started to degrade in the underground atmosphere, the team deployed the FirstLooks off the back of the large robot (it could hold up to four) and used the MPU radios as part of its MESH network to get communications all the way through, Weatherwax notes. A FirstLook robot has some autonomy. If it lands upside down after dropping off the Kobra, it can flip itself over and still maintain communications, he explains.
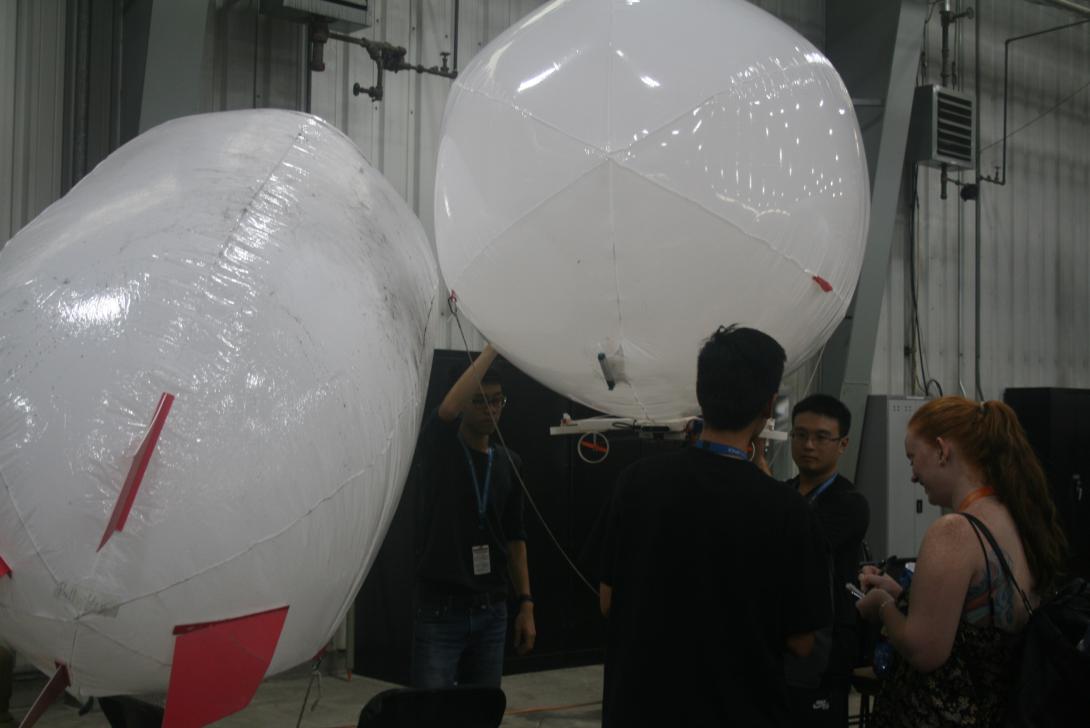
The National Chiao Tung University (NCTU) team from Hsinchu, Taiwan—the youngest crew at the SubT challenge—took a unique approach, using airships, or blimps, as their aerial component. The team based their ground robot on a four-wheeled Husky robot platform from ClearPath, augmented with computing, LIDAR and multiple RGB-D cameras, for perception, navigation and searching for artifacts, says Chen-Lung “Eric” Lu, NCTU team lead. They also employed so-called anchor balls, softball-sized spheres, used as a landmark or anchor that created a mesh network when dropped off the ground vehicle. The anchor balls contain a camera and a self-realigning capability, which keeps the camera facing upwards even when the ball is rolling, Lu shares.
The self-designed blimps were made out of lightweight, flexible plastic—resembling the plastic of a beach ball—with four mecanum control motors (for omni-directional flight) and two motors to elevate or lower the blimp, notes Daniel Huang, NCTU UAV system software lead. Team NCTU chose the airships for their collision tolerance and for their ability to run longer than other aerial systems.
NCTU is working out issues of motion blur and the blimp’s mapping capabilities, Huang shares. “We tried to align each segment of the map together when there is a motion blur so that the map can be aligned together,” he notes. “It is not perfect, but this is our current strategy.”
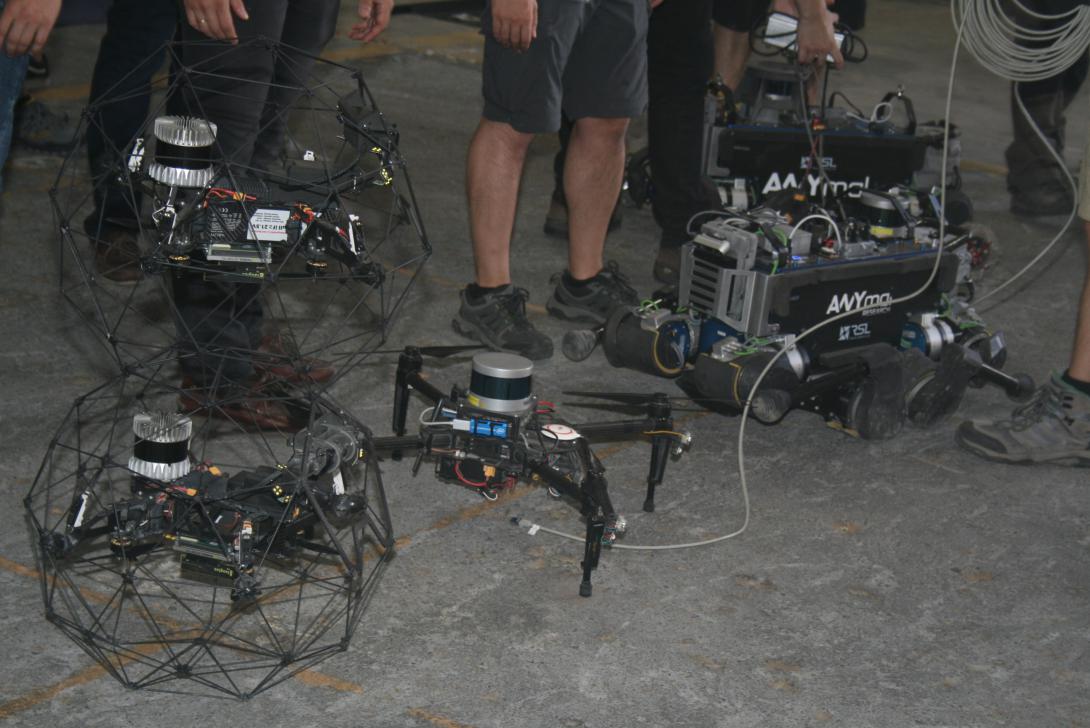
Team Cerebus relied on small-scale millimeter wave radar, and to create a communications network, it used an ultra-wideband network with wireless mesh networking. The team depended on both wheeled robots, which it used as a portable antenna to provide Wi-Fi to the four-legged robots based on the ANYmal platform. The ANYmal robots then would drop other network nodes inside the tunnel to provide communicates to the other robots behind them.
From the Czech Republic and Canada, Team CTU-CRAS, which came in third place overall and in first place of the non-DARPA funded teams, relied on tracked robots, a large wheeled robot and several aerial systems.
Comparatively, Team Co-STAR, which came in second place, sent a combination of wheeled robots and a quadcopter into the tunnels and employed various communications techniques, including both daisy chain and breadcrumb solutions, says Ali-akbar Agha-mohammadi, robotics research technologist, Jet Propulsion Laboratory (JPL).
“Our solution relies on various options, different frequencies and different ways of mesh networking, so that if there is interference or challenges with multipath signal fading, we can create resiliency through redundancy,” states Agha. “In the last two runs, we dropped a few comm nodes, but what we observed was that daisy chaining just the robots themselves was pretty powerful; but if needed, if the five robots weren’t enough, we could start dropping comm nodes. We loaded the maximum number of comm nodes on the robots, just in case, because we didn’t know what the environment in the tunnels would be.”
In addition to their network strategy, and relying on state of the art computing, Team Co-STAR used advanced sensing, which included a mix of cameras, LIDAR, RGB-D cameras, inertial sensors and thermal cameras, adds Carlone. The MIT professor clarifies that a robust combination of computer vision, estimation, and machine learning was necessary for the subterranean environment.
“For SubT, the navigation part is quite challenging, so there is no single platform that is able to complete the entire mission,” Carlone notes. “You must use all these capabilities. And the inertial measurement units, on all our vehicles, is the only thing that you can use to estimate the motion of the robot, if all of the other sensors essentially become blind because of smoke or low illumination.”
The teams are busy preparing for the upcoming SubT urban circuit in February and deciding how to put together a different combination of robotic systems that could operate and communicate successfully in an underground city environment, such as a subway system. This month, DARPA expects to disclose the location of this second phase, and later, will release details on the cave circuit.
For their preparation, Co-STAR will add embedded radar solutions, and for the third phase of the contest, they are developing a so-called magnetic quasi-static system, a localization tool “that acts kind of like a GPS,” Agha notes. Moreover, the team’s hybrid, ground-to-aerial systems—rollercopters and drivercopters, which were not used in Pittsburgh because of the mud in the tunnels—are another deployment option to extend operations, especially for vertical shafts.
All of the team’s work in autonomous robotics helps to inform future NASA missions to navigate and explore subsurface voids, the JPL technologist adds. “For NASA, it is really important because subsurface voids are some of the most likely places to harbor life, and it is in NASA’s future missions to go into planetary caves or Martian caves.”
Meanwhile, Humbert expects the urban underground challenge to “be very aerial-heavy focused,” he says. “I assume it’s going to be like a D.C. metro station, where we’ll have to navigate platforms and stairs and larger drop-offs. So, a lot of the platforms from the tunnel circuit that are having success won’t necessarily translate to this next phase.”
To continue to push the advancement of robotic underground operations, DARPA will be providing more puzzling constraints to further test the teams in these events, promises Timothy Chung, program manager, Tactical Technology Office, DARPA. “The competitors better not be complacent, for in the urban and cave circuits coming up, we have a few more surprises up our sleeves,” Chung advises.



Comments